架构搜索阅读笔记:β-DARTS: Beta-Decay Regularization for Differentiable Architecture Search
最近做了一个量子架构搜索的项目,对相关的神经架构搜索论文做了简单调研,这里做一个简单的记录分享,以备后用。
首先从deepmind提出的DARTS架构相关的研究开始,这次介绍的论文题为《β-DARTS: Beta-Decay Regularization for Differentiable Architecture Search》,由复旦大学、百度、上海人工智能实验室、悉尼大学以及商汤科技视觉组的研究人员共同完成。论文针对神经网络架构搜索(NAS)中的问题,特别是DARTS方法在性能稳定性和泛化能力方面的不足,提出了一个名为Beta-Decay的正则化方法来改进。
核心内容
-
背景与动机:随着自动设计深层神经网络的能力不断增强,NAS技术受到了越来越多的关注。其中,基于梯度优化的DARTS因其高效性而受到欢迎。然而,DARTS存在两个主要问题:一是对性能崩溃的鲁棒性较弱;二是搜索到的架构在不同数据集上的泛化能力较差。
-
提出的方法:为了解决上述问题,论文提出了一种简单但有效的正则化方法——Beta-Decay。这种方法能够通过限制激活的架构参数值及其方差过大,从而对DARTS的搜索过程进行正则化处理。此外,还提供了关于为何及如何起作用的理论分析。
-
实验验证:通过对NAS-Bench-201等基准测试的实验结果表明,所提方法有助于稳定搜索过程,并使搜索到的网络结构更加易于跨数据集迁移。同时,提出的搜索方案展现出较少依赖于训练时间和数据量的良好特性。此外,作者在多种搜索空间和数据集上进行了综合实验,进一步验证了所提方法的有效性。
核心方法 - Beta-Decay 正则化
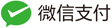
该论文的方法可以用一行代码来表示,见下图:
图一:β正则化核心方法
从图一可以看到,Beta-decay正则化简单对模型的架构参数进行限制,即对每个架构参数$\beta$施加约束,使其保持在一个较小的范围内。约束条件如下:
$
L_{\text{Beta}} = mean(log(\sum(exp(\beta))))
$
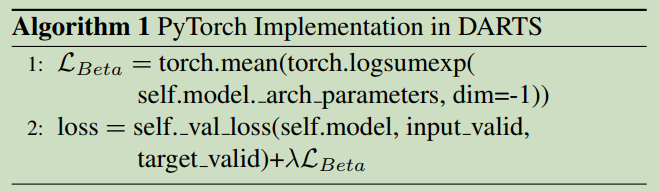
除了该约束外,模型的其他部分与DRARTS完全相同,相比另一正则化方法DARTS-,对比结果见图二:
图二:DARTS与β正则化对比
该约束的出发点可以归纳到以下两点:
- 在DARTS中,每个计算节点包含多个候选操作,通过学习可微分的架构参数β来混合不同操作的输出。为了将离散的操作选择转换成连续的参数优化问题,DARTS采用softmax函数计算出每个操作对应的权重β。针对架构参数β,传统的正则化方法如L2或权重衰减正则化在自适应梯度算法下效果不佳,因为它们会导致每个元素的惩罚相对均匀,部分抵消了正则化的效应。
- Beta-Decay正则化直接作用于架构参数的优化过程,通过施加约束以防止激活的架构参数值及其方差变得太大,从而提高搜索过程中架构的稳定性并增强最终架构的泛化能力。
显然,这一方法不仅适用于DARTS,也可以应用于其他基于梯度优化的NAS方法中,可以说提供了一个通用的解决方案。
实验中,Beta-Decay正则化在不牺牲效率的前提下提升了DARTS方法的稳定性和泛化性能,仅在架构参数更新上添加了新的loss项,做了简单修改。
理论分析与证明
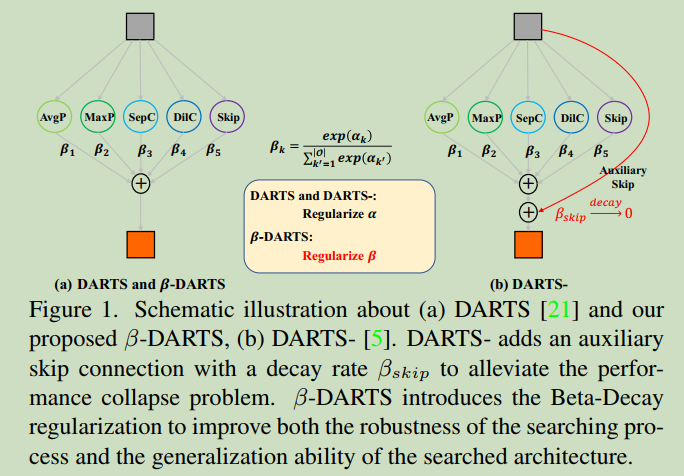
尽管方法非常简单,但实验表明了Beta-Decay正则化方法的优势,相比L2和weight decay的对比结果见下图:
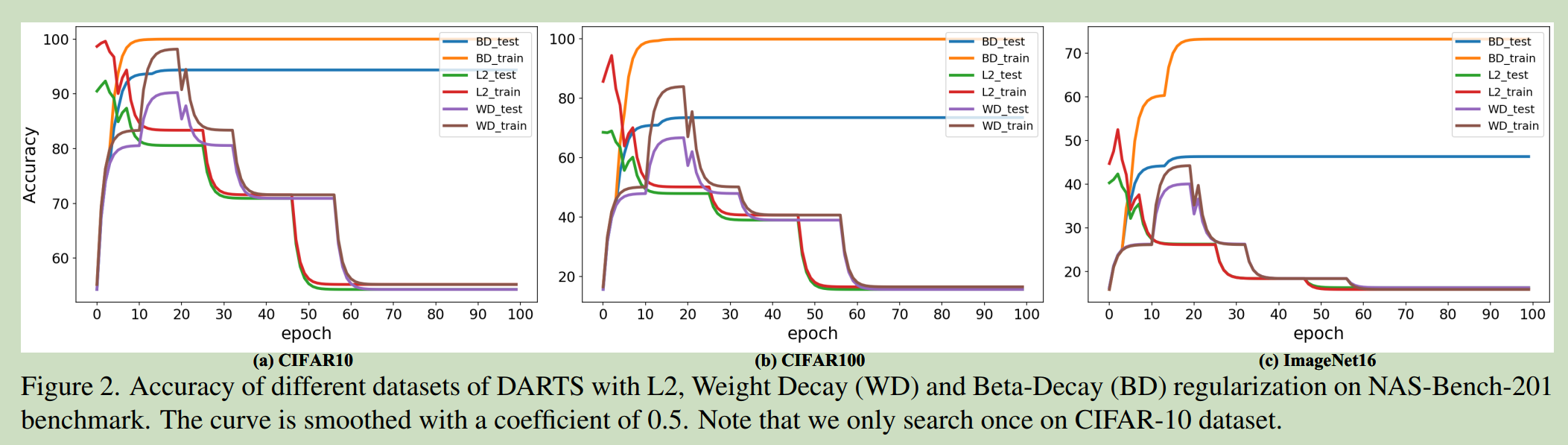
图三:Beta-decay与不同正则化方法的实验结果
理论证明包括两点,分别从鲁棒性和泛化能力两个方面进行证明。
更强的鲁棒性
根据研究工作[2]的结论,超网络(可以理解为DARTS中包含多个子操作的节点)中网络权重$ w $的收敛性严重依赖于架构参数中的skip连接权重$ \beta_{\text{skip}} $。具体来说,假设在搜索空间中有三个操作(卷积、skip连接和无操作),并且训练损失为均方误差(MSE)。当固定架构参数并通过梯度下降优化网络权重时,在一步迭代中,训练损失可以以至少$ 1 - \sigma $的概率降低,降低比率为$ (1 - \eta_w\varphi/4) $,其中$ \eta_w $是相应的学习率,受$ \sigma $约束,且$ \varphi $遵循如下关系:
$ \varphi \propto h^{-2} \sum_{i=0}^{h-1} \left( \beta_{\text{conv}}^{(i,h-1)} \right)^2 \prod_{t=0}^{i-1} \left( \beta_{\text{skip}}^{(t,i)} \right)^2 $
上式中,$ h $是超网的层数。从上面可以看出,$ \varphi $更多地依赖于$ \beta_{\text{skip}} $而不是$ \beta_{\text{conv}} $,这表明当skip连接权重较大时,超网络权重可以更快地收敛。
然而,通过对$ \beta $施加Beta-Decay正则化,可以重新定义$ \varphi $为(同时优化架构参数和网络权重):
$ \varphi \propto h^{-2} \sum_{i=0}^{h-1} \left( \theta_{\text{conv}}^{(i,h-1)} \beta_{\text{conv}}^{(i,h-1)} \right)^2 \prod_{t=0}^{i-1} \left( \theta_{\text{skip}}^{(i,h-1)} \beta_{\text{skip}}^{(t,i)} \right)^2 $
可以看出,当$ \beta $较大时$ \theta $(即网络权重)变小,当$ \beta $较小时$ \theta $变大。这意味着网络权重的收敛更加依赖于卷积层权重而非skip连接权重。从收敛的角度来看,Beta-Decay正则化限制了skip连接权重的特权,确保了架构参数之间的公平竞争。
更强的泛化能力
参照文献[3],Lipschitz约束通常用于衡量并改进训练好的深度模型的泛化能力。特别地,假设由深度模型拟合的函数为$ f_w(x) $,其中$ x $是输入。当$ |x_1 - x_2| $非常小时,一个训练良好的模型应该满足以下约束:
$ |f_w(x_1) - f_w(x_2)| \leq C(w) \cdot |x_1 - x_2| $
其中$ C(w) $是Lipschitz常数。该常数越小,训练好的模型对输入扰动就越不敏感,从而具有更好的泛化能力。
进一步地,这种理论可以扩展到可微架构搜索。考虑单层神经网络的情况,多层神经网络可以通过逐步递归分析解决。假设映射函数$ F $选择得当,如使用softmax函数进行归一化,那么Beta-Decay正则化可以帮助最小化架构参数定义的Lipschitz约束,从而确保搜索到的架构具有较好的泛化能力。
综上,通过引入Beta-Decay正则化,可以避免传统正则化方法可能带来的无效惩罚问题,并有效控制架构参数的变化范围,促进搜索过程中架构参数之间的公平竞争,提高搜索结果的稳定性以及网络结构的泛化性能。最关键的,该方法实现起来非常简单,无需对现有代码进行修改,只要在损失函数中添加一个新的loss项即可。
参考文献
[1] β-DARTS: Beta-Decay Regularization for Differentiable Architecture Search
[2] Theory-inspired path-regularized differential network architecture search
[3] Lipschitz regularized deep neural networks generalize and are adversarially robust